Unsupervised Machine Translation with Monolingual Data
The second model proposed in this area was created by Facebook AI in 2017 and published in this paper: “Unsupervised Machine Translation Using Monolingual Corpora only”. The proposed system follows a standard encoder-decoder architecture with standard attention mechanism assisted by a back-translation procedure where
-
There is one encoder which is a three-layer bidirectional RNN responsible for encoding source sentences $\mathcal{D}_{\text{src}}$ to a latent space $Z$.
-
There is one decoder which is a three-layer unidirectional RNN responsible for decoding target sentences $\mathcal{D}_{\text{tgt}}$ to a latent space $Z$.
-
All RNNs use LSTM cells with 300 hidden units, and the dimensionality of the embeddings is set to 300 as well.
The key idea is to build a common latent space between two languages and to learn to translate by reconstructing in both domains according to two principles:
- Denoising: The model has to be able to reconstruct a sentence in a given language from a noisy version of it, as in standard denoising auto-encoders.
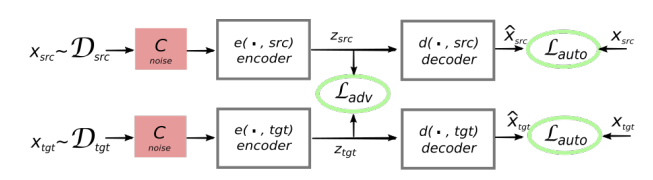
- Cross-domain Translation: The model also has to be able to reconstruct a source sentence given a noisy translation of the same sentence in the target language, and vice versa.

Denoising
The whole idea of the system is to train a model to reconstruct its own input. More concretely, the system takes an input sentence in a given language, encode it using the shared encoder, and reconstruct the original sentence using the decoder of that language. That’s why we have two decoders for each language.
But this training procedure is essentially a trivial copying task. And it’s highly probable that our model could just blindly copy elements from the input sequence without gaining any real knowledge. In order to avoid that, they used denoising. Denoising is the process of applying a noise function on the input. They used two different noise functions:
-
Shuffling: They shuffle the input sentence where a word at position $i$ can’t be further than either $i - k$ or $i + k$ where they found out that $k = 3$ is a good value.
-
Dropping: They drop every word in the input sequence by a probability of $p = 0.1$
This way, the system needs to learn about the internal structure of the languages involved to be able to recover the correct word order. At the same time, by discouraging the system to rely too much on the word order of the input sequence.
Cross-domain Translation
The second objective is to constrain the model to be able to map an input sentence from a the language $\ell_{1}$ to $\ell_{2}$ and vice versa. The principle can be summarized in the following steps:
-
We will use an earlier version of the model, denoted $M$, to generate a translation $y$ of a given sentence $x$.
-
Then, this translation $y$ will be denoised using our denoising functions (discussed in the last part) to get a corrupted version of the translation $C\left( y \right)$.
-
This corrupted version $C\left( y \right)$ will be inserted as input to the current version of the model and the model will try to reconstruct $x$ from $C\left( y \right)$.
Adversarial Training
To boost performance, they created another neural network, which we will refer to as the discriminator, to classify between the encoding of source sentences and the encoding of target sentences.
The discriminator is a multilayer perceptron with three hidden layers of size 1024, Leaky-ReLU activation functions and an output logistic unit. The discriminator is trained using RMSProp with a learning rate of 0.0005.
The discriminator operates on the output of the encoder , which is a sequence of latent vectors $Z$ and produces a binary prediction about the language of the encoder input sentence.
Final Objective Function
The final objective function at one iteration of our learning algorithm is thus:
\[\mathcal{L}\left( \theta_{\text{enc}},\ \theta_{\text{dec}},\ Z \right) = \lambda_{\text{auto}}\left\lbrack \mathcal{L}_{\text{auto}}\left( \theta_{\text{enc}},\ \theta_{\text{dec}},\ Z,\ src \right) \\ + \mathcal{L}_{\text{auto}}\left( \theta_{\text{enc}},\ \theta_{\text{dec}},\ Z,\ tgt \right) \right\rbrack \\ + \lambda_{\text{cd}}\left\lbrack \mathcal{L}_{\text{cd}}\left( \theta_{\text{enc}},\ \theta_{\text{dec}},\ Z,\ src,\ tgt \right) \\ + \mathcal{L}_{\text{cd}}\left( \theta_{\text{enc}},\ \theta_{\text{dec}},\ Z,\ src,\ tgt \right) \right\rbrack \\ + \lambda_{\text{adv}}\left\lbrack \mathcal{L}_{\text{adv}}\left( \theta_{\text{enc}},\ Z \middle| \theta_{D} \right) \right\rbrack\]Where:
- $\mathcal{L}_{\text{auto}}$ is the auto-encoding loss function; where $\widehat{x}\sim d\left( e\left( C\left( x \right),\ \ell \right),\ \ell \right)$ means that $\widehat{x}$ is a reconstruction of the corrupted version of $x$. And $\mathrm{\Delta}\left( \widehat{x},\ x \right)$ is the sum of token-level cross-entropy losses:
- $\mathcal{L}_{\text{cd}}$ is the cross-domain translation loss function:
- $\mathcal{L}{\text{adv}}$ is the adversarial loss function where $e\left( x{i},\ell_{i} \right)$ is the output of the encoder and $p_{D}$ is the discriminator output which is either $0$ or $1$:
- $\lambda_{\text{audo}},\ \lambda_{\text{cd}},\ \lambda_{\text{adv}}$ are hyper-parameters weighting the importance of the auto-encoding, cross-domain translation and adversarial loss respectively.